

Contact R&D: Duy-Ha PHUNG ; Sébastien BONNIEUX
MUG-OBS
MUG is a multichannel 4 year’s autonomy Ocean Bottom System named MUG-OBS (for Multi-parameters Geophysical Ocean Bottom System) allowing the acquisition of various seismic and environmental parameters. Initially developed for a 3-channel seismometer (Trillium compact 120s), a 3-channel accelerometer, a Differential Pressure Gauge (DPG), an absolute pressure sensor and a hydrophone, the acquisition system can interface other sensors.
Its originality lies in the possibility of data transfer to the surface using releasable-shuttles triggered by acoustic command. MUG can carry up to six shuttles. It is a free-falling instrument rated to 6000 m. The installation of the seismic sensor is monitored by acoustic commands from the surface and a health bulletin with data checking is recovered by acoustic during the installation. Since sensors stayed at the same location for 4 years period, it is a perfect tool to monitor seismic events (slow earthquakes), background seismic activity and aftershock distribution among other applications.
The structure is made of non-corrosive materials, polyethylene, peek, nylon, and pressure vessels are made in glass or titanium (Figure 1). Buoyancy is ensured by syntactic foam. The steel dead weight anchor, which draws down the OBS to the bottom of the Ocean is protected by anodes. The whole structure is shaped to resist trawling. Seismic sensors are protected in a central well created by the structure itself to prevent noise from current convection and mechanically decoupled from this structure to ensure a good.
After 2 periods of 3 years at sea bottom in location between Nice and Corsica, MUG-OBS electronics has been refurbished and is now deployed for à 4 years period.
MERMAID - Mobile Earthquake Recorder in Marine Areas by Independent Divers
Since 2009, thanks to the GLOBALSEIS project funded by the ERC (European Research Council), G. Nolet (now Professor Emeritus at UCA), and Géoazur's R&D department, under the direction of Yann Hello, have developed a robot that drifts at programmed depths in the oceans and communicates at regular intervals via Iridium satellite with our researchers. This "MERMAID" is capable of recording seismic waves at sea to image the interior of the globe (Hello et al., 2011, 2020; Sukhovich et al., 2011, 2015). In 2019, one of the FIEEC CARNOT Applied Research Prizes, which rewards researchers who have led a research partnership with an SME that has had a real economic impact, was awarded to Yann Hello of Geoazur.
In 2018/2019, no fewer than 51 third-generation Mermaids were launched in the South Pacific (see: geoweb.princeton.edu/people/simons/earthscopeoceans), and since more than 50 delivered for other projects. Previously, a MERMAIDS deployment near the Galapagos Islands imaged a deep mantle plume beneath the archipelago (Nolet et al., 2019).
Geoazur's R&D division, in collaboration with engineers from OSEAN SARL in Le Pradet, has pushed ahead with the development of a "Lander 4000m" version for rapid deployment after major earthquakes, which can land on the seafloor and conduct static observation for a given period. The next generation of this remotely-programmable float, which can carry up to eight different sensors and land at 6000m, will be equipped with a tri-axial broadband seismic sensor, a high-frequency hydrophone for detecting meteorological events (wind, sea, rain, etc.) and marine mammals. This PEPR Origins-funded project is led by Karin Sigloch. Mermaid is already equipped with a CTD.
HALIOS, an innovative Broad Band OBS
Halios incorporates the innovative features designed for the MUG-OBS station.
Halios has an autonomy of 18 months. Developed with Osean and marketed since 2023, Halios is a latest-generation OBS featuring a seismic sensor integrating a Nanometric 120s seismometer and a MEMS accelerometer in a single container. This sensor is located inside a well created by the Halios structure, coupled to the ground without contact with the OBS chassis, and protected from seabed currents. A broadband hydrophone completes the seismic observations. Halios also incorporates a Paroscientific pressure sensor and a high-precision temperature probe.
Parameters and vital information (health bulletin) can be accessed acoustically once the OBS is deployed, and the same acoustic channel can be used to control the ascent to the surface for recovery. Once on the surface, Halios transmits its GPS position to the vessel via VHF, indicating distance and heading. It can also transmit this position by Iridium satellite in the event of an untimely ascent due to trawling, for example. It also automatically measures the drift of its internal clock during the immersion period against a GNSS signal.
An acoustic modem also enables signals detected by an algorithm to be retrieved from a catalog. A sophisticated IHM interface makes programming and use of Halios easy for inexperienced users, making it the ideal tool for young teams looking for high-performance equipment and immediate results.
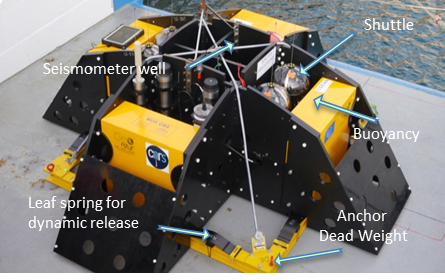 |
Figure 1: MUG-OBS 2.9m x 2.9m x 1m, for a weight in Air 1.5t (3307Lb) is made of non-conductive material (Syntactic foam, Polyethylene, glass and Titanium) and shaped to resist trawling. The dead weight anchor made in steel with anodes is abandoned on recovery to allow MUG-OBS to rise by its own positive buoyancy. When released from anchor, height leaf springs will produce an additional 8 x 25kg force to help the 250 Kg of buoyancy for taking off. |
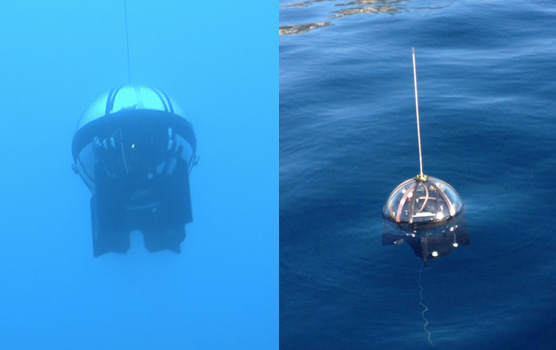 |
Figure 2: Data shuttle on its way to the surface and at sea-surface. The electronic, encapsulated in a 13’’ glass sphere, is designed around a Cortex M4 microprocessor, memory boards (SD cards), an internal clock, a flash light, a GPS and AIS to track the shuttle on the surface, and is powered by a LiSO2 battery. The shuttle clock synchronizes with the main clock of the system just before the shuttle is released, and synchronizes itself as soon as a GPS signal is received at sea-surface. This enables monitoring the clock-drift of the main acquisition clock at each shuttle recovery over the 3 years of the MUG-OBS permanent installation. |
